TDAlgorithms_IEEE24
parents
Showing
.gitignore
0 → 100644
Algorithms/ABTD.py
0 → 100644
Algorithms/BaseGradient.py
0 → 100644
Algorithms/BaseLS.py
0 → 100644
Algorithms/BaseTD.py
0 → 100644
Algorithms/BaseVariableLmbda.py
0 → 100644
Algorithms/ETD.py
0 → 100644
Algorithms/ETDLB.py
0 → 100644
Algorithms/GEMETD.py
0 → 100644
Algorithms/GTD.py
0 → 100644
Algorithms/GTD2.py
0 → 100644
Algorithms/HTD.py
0 → 100644
Algorithms/LSETD.py
0 → 100644
Algorithms/LSTD.py
0 → 100644
Algorithms/PGTD2.py
0 → 100644
Algorithms/TB.py
0 → 100644
Algorithms/TD.py
0 → 100644
Algorithms/TDRC.py
0 → 100644
Algorithms/Vtrace.py
0 → 100644
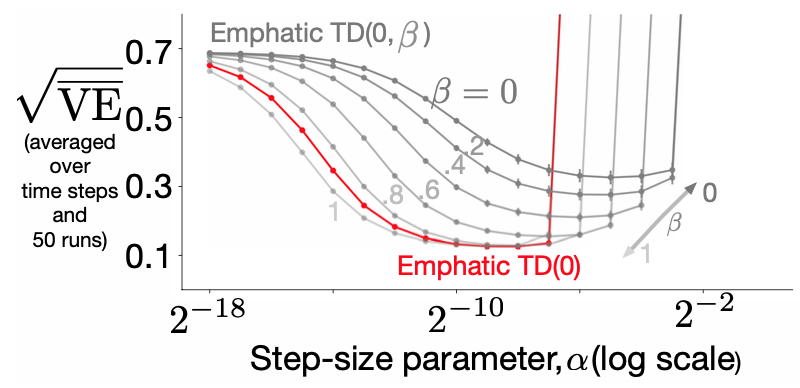
Assets/Emphatics_sensitivity.png
0 → 100644
{kind=link}
104 KB
Assets/FourRoomGridWorld.gif
0 → 100644
{kind=link}
396 KB
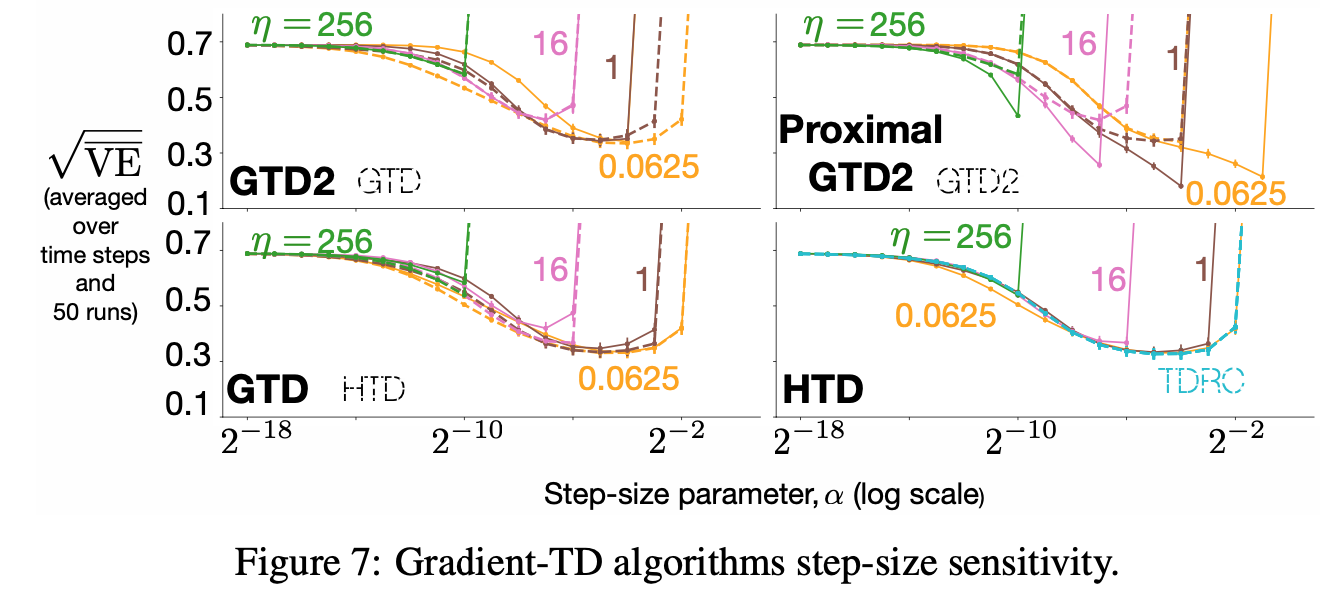
Assets/Gradients_sensitivity.png
0 → 100644
{kind=link}
196 KB
Assets/chain.gif
0 → 100644
{kind=link}
3.26 KB
Assets/eight_state_collision.png
0 → 100644
{kind=link}

73.7 KB
Assets/learning_curves.png
0 → 100644
{kind=link}
117 KB
Assets/parameters.png
0 → 100644
{kind=link}
122 KB
Assets/plots.png
0 → 100644
{kind=link}
115 KB
Assets/rlai.png
0 → 100644
{kind=link}

81.1 KB
Assets/sensitivity_curves_of_all_algs.png
0 → 100644
{kind=link}
572 KB
Assets/specific_learning_curves.png
0 → 100644
{kind=link}
118 KB
Assets/value_functions.png
0 → 100644
{kind=link}

163 KB
Environments/Chain.py
0 → 100644
Environments/FourRoomGridWorld.py
0 → 100644
Environments/rendering.py
0 → 100644
Environments/utils.py
0 → 100644
Experiments/1HVFourRoom/ABTD/ABTD.json
0 → 100644
Experiments/1HVFourRoom/ETD/ETD.json
0 → 100644
Experiments/1HVFourRoom/ETDLB/ETDLB.json
0 → 100644
Experiments/1HVFourRoom/GTD/GTD.json
0 → 100644
Experiments/1HVFourRoom/GTD2/GTD2.json
0 → 100644
Experiments/1HVFourRoom/HTD/HTD.json
0 → 100644
Experiments/1HVFourRoom/PGTD2/PGTD2.json
0 → 100644
Experiments/1HVFourRoom/TB/TB.json
0 → 100644
Experiments/1HVFourRoom/TD/TD.json
0 → 100644
Experiments/1HVFourRoom/TDRC/TDRC.json
0 → 100644
Experiments/1HVFourRoom/Vtrace/Vtrace.json
0 → 100644
Experiments/FirstChain/ABTD/ABTD.json
0 → 100644
Experiments/FirstChain/ETD/ETD.json
0 → 100644
Experiments/FirstChain/ETDLB/ETDLB.json
0 → 100644
Experiments/FirstChain/GTD/GTD.json
0 → 100644
Experiments/FirstChain/GTD2/GTD2.json
0 → 100644
Experiments/FirstChain/HTD/HTD.json
0 → 100644
Experiments/FirstChain/PGTD2/PGTD2.json
0 → 100644
Experiments/FirstChain/TB/TB.json
0 → 100644
Experiments/FirstChain/TD/TD.json
0 → 100644
Experiments/FirstChain/TDRC/TDRC.json
0 → 100644
Experiments/FirstChain/Vtrace/Vtrace.json
0 → 100644
Experiments/FirstFourRoom/ABTD/ABTD.json
0 → 100644
Experiments/FirstFourRoom/ETD/ETD.json
0 → 100644
Experiments/FirstFourRoom/ETDLB/ETDLB.json
0 → 100644
Experiments/FirstFourRoom/GTD/GTD.json
0 → 100644
Experiments/FirstFourRoom/GTD2/GTD2.json
0 → 100644
Experiments/FirstFourRoom/HTD/HTD.json
0 → 100644
Experiments/FirstFourRoom/PGTD2/PGTD2.json
0 → 100644
Experiments/FirstFourRoom/TB/TB.json
0 → 100644
Experiments/FirstFourRoom/TD/TD.json
0 → 100644
Experiments/FirstFourRoom/TDRC/TDRC.json
0 → 100644
Experiments/FirstFourRoom/Vtrace/Vtrace.json
0 → 100644
ExportBin/ReadMe
0 → 100644
Job/Cedar_Create_Config_Template.sh
0 → 100644
Job/JobBuilder.py
0 → 100644
Job/SubmitJobsTemplates.SL
0 → 100644
Job/SubmitJobsTemplatesCedar.SL
0 → 100644
Learning.py
0 → 100644
Plotting/plot_dist.py
0 → 100644
Plotting/plot_learning_curve.py
0 → 100644
Plotting/plot_learning_for_two_lambdas.py
0 → 100644
Plotting/plot_params.py
0 → 100644
Plotting/plot_sensitivity.py
0 → 100644
Plotting/plot_sensitivity_for_two_lambdas.py
0 → 100644
Plotting/plot_specific_learning_curves.py
0 → 100644
Plotting/plot_utils.py
0 → 100644
Plotting/plot_waterfall.py
0 → 100644
Plotting/process_state_value_function.py
0 → 100644
README.md
0 → 100644
Registry/AlgRegistry.py
0 → 100644
Registry/EnvRegistry.py
0 → 100644
Registry/TaskRegistry.py
0 → 100644
Resources/EightStateCollision/d_mu.npy
0 → 100644
File added
File added
File added
File added
File added
File added
File added
File added
File added
Tasks/BaseTask.py
0 → 100644
Tasks/EightStateCollision.py
0 → 100644
Tasks/LearnEightPoliciesTileCodingFeat.py
0 → 100644
Tests/Algorithms/TestTD.py
0 → 100644
Tests/Environments/TestChain.py
0 → 100644
Tests/Tasks/TestEightStateCollision.py
0 → 100644
data_presister.py
0 → 100644
main.py
0 → 100644
plot_data.py
0 → 100644
process_data.py
0 → 100644
requirements.txt
0 → 100644
| #matplotlib>=3.2.2 | ||
| #numpy>=1.19.0 | ||
| imageio>=2.9.0 | ||
| pyglet>=1.5.11 | ||
| scikit_image>=0.17.2 |
test.py
0 → 100644
unittest_suite.py
0 → 100644
utils.py
0 → 100644